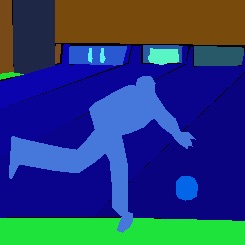
The goal of this challenge is to segment and parse an image into different image regions associated with semantic categories, such as sky, road, person, and bed. The data for this challenge comes from ADE20K Dataset which contains more than 20K scene-centric images exhaustively annotated with objects and object parts. Specifically, the challenge data is divided into 20K images for training, 2K images for validation, and another batch of held-out images for testing. There are totally 150 semantic categories included in the challenge for evaluation, which include stuffs like sky, road, grass, and discrete objects like person, car, bed. Note that there are non-uniform distribution of objects occuring in the images, mimicking a more natural object occurrence in daily scene.
For each image, segmentation algorithms will produce a semantic segmentation mask, predicting the semantic category for each pixel in the image. The performance of the algorithms will be evaluated on the mean of pixel-wise accuracy and the Intersection over Union (IoU) averaged over all the 150 semantic categories.
This scene parsing challenge is held jointly with ILSVRC'16. Winners will be invited to present at ILSVRC and COCO joint workshop at ECCV 2016. Take a look at the relevant challenge Places2 Scene Recognition 2016.Demo of scene parsing is available. The pre-trained models and demo code of scene parsing are released.
The result of the Scene Parsing Challenge 2016 is released!
To evaluate the segmentation algorithms, we will take the mean of the pixel-wise accuracy and class-wise IoU as the final score. Pixel-wise accuracy indicates the ratio of pixels which are correctly predicted, while class-wise IoU indicates the Intersection of Union of pixels averaged over all the 150 semantic categories. Refer to the development kit for the detail.
NOTICE FOR PARTICIPANTS: In the challenge, you could use any pre-trained models as the initialization, but you need to write in the description which models have been used. There is only "provided data" track for the scene parsing challenge at ILSVRC'16, which means that you can only use the images and annotations provided and you cannot use any other images or segmentation annotations, such as Pascal or CityScapes. In the testing images, scene labels will not be provided.
UPDATE (Augest 27, 2016): Some participants have some concerns about the definition of pre-trained models and the 'provided data track'. Here given that this is 'provided data track', the pre-trained models to be used have to be trained on the provided data in this ILSVRC'16 ONLY, which means you can use pre-trained models trained on the standard 1.2M imagenet data and the Places365 data, but not the pretrained models trained on CityScape, Pascal, COCO, or other external or internal datasets.
Bolei Zhou
MIT
Hang Zhao
MIT

Xavier Puig
MIT

Sanja Fidler
University of Toronto
Adela Barriuso

Antonio Torralba
MIT
If you find this scene parse challenge or the data useful, please cite the following papers:
Scene Parsing through ADE20K Dataset. Computer Vision and Pattern Recognition (CVPR), 2017. [PDF] [bib]Semantic Understanding of Scenes through ADE20K Dataset. International Journal on Computer Vision (IJCV) [PDF][bib]